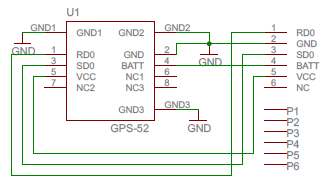
感度を高めるためGPSアンテナの周囲にグランド領域を設ける目的もあります。
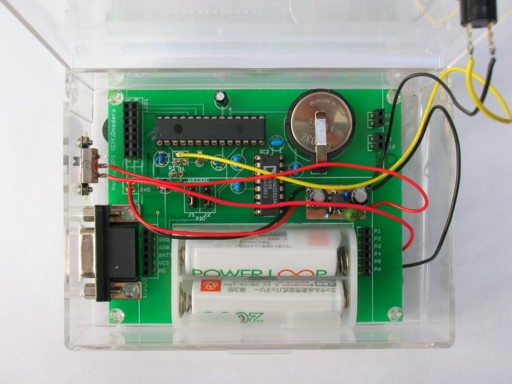
メイン基板の小亀とします。
メイン基板の回路です。
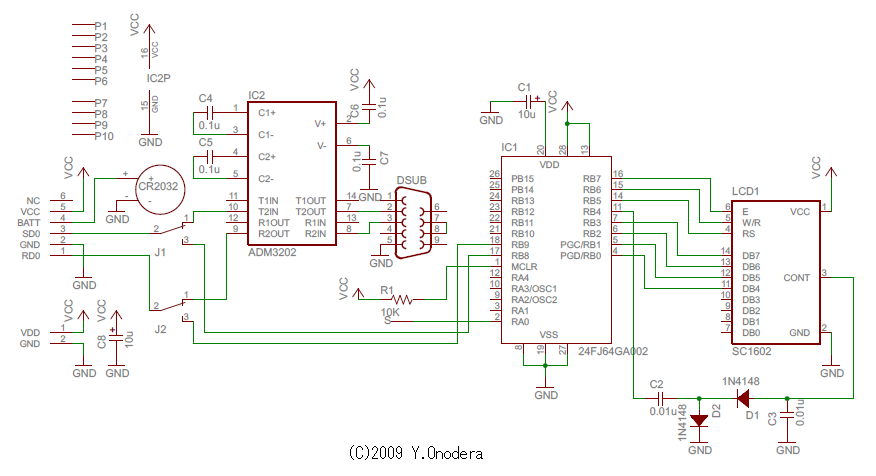
- GPS-52Dは3.3V動作のため、電源電圧を3.3Vに統一します。
- SC1602は3.3Vではコントラスト不足のため、PIC24F64GA002のPWMを使ってマイナス電源を加えます。
- PIC24F64GA002のPWMをソフトウェア調整することでコントラストを調整します。
- RS232Cを使ってPCと接続するときには、ジャンパーでPIC24F64GA002を切り離します。